






BOSM - Horisontaalne vastupuurimis- ja puurimismasin
1. Seadmete kasutamine:
BOSM-i horisontaalne puur- ja puurmasin on teie ettevõtte jaoks spetsiaalne masin tornkraanade korkide töötlemiseks. Masin on varustatud kahe horisontaalse puurimis- ja puurimispeaga, mis võimaldavad puurimist, freesimist ja detailide puurimist efektiivse käiguvahemiku piires. Lõikamine ja muu töötlemine, seadmete positsioneerimiskiirus on kiire, töötlemise täpsus on kõrge ja töötlemise efektiivsus kõrge.
2. Seadme struktuuri omadused:
2. 1. PõhikomponendidMasin
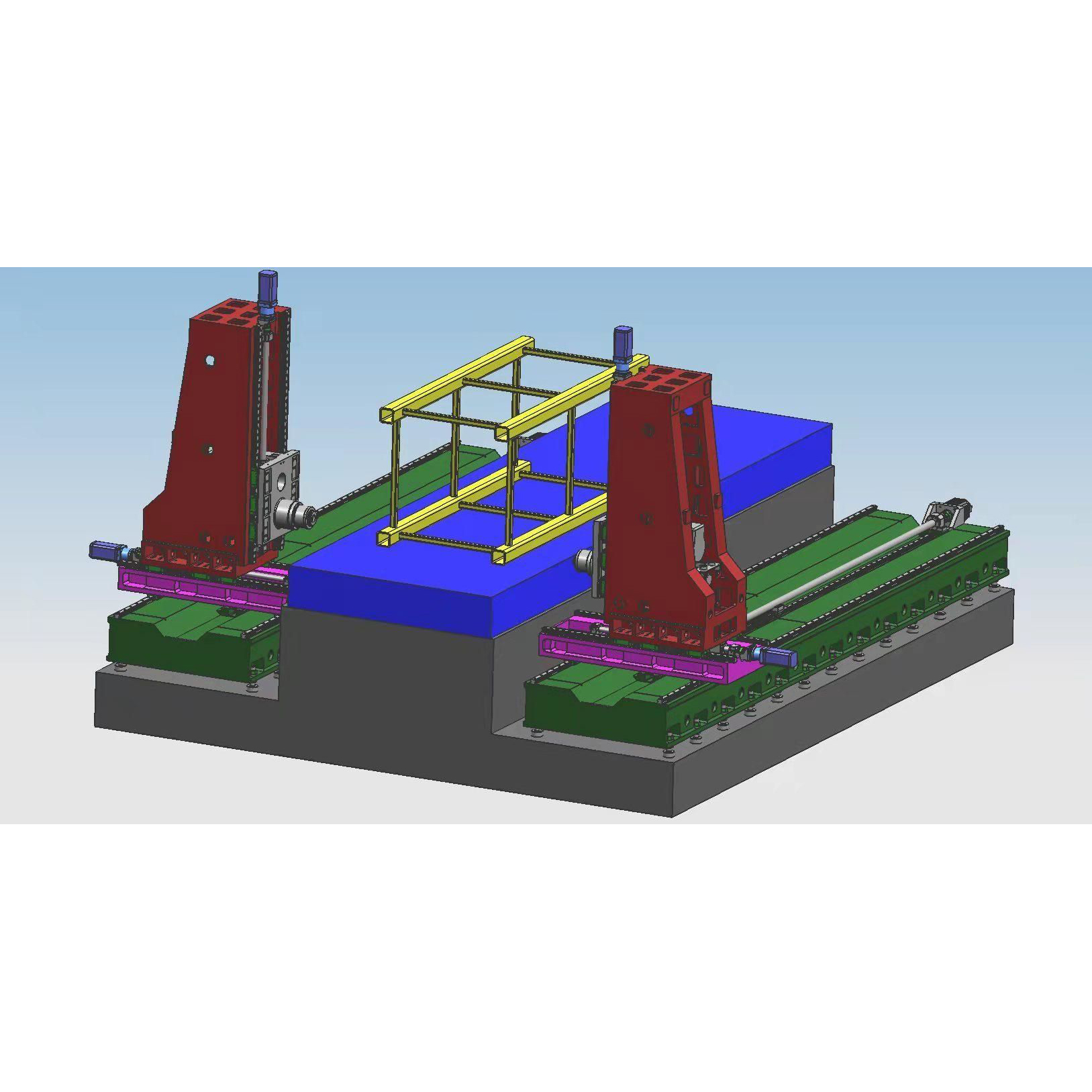
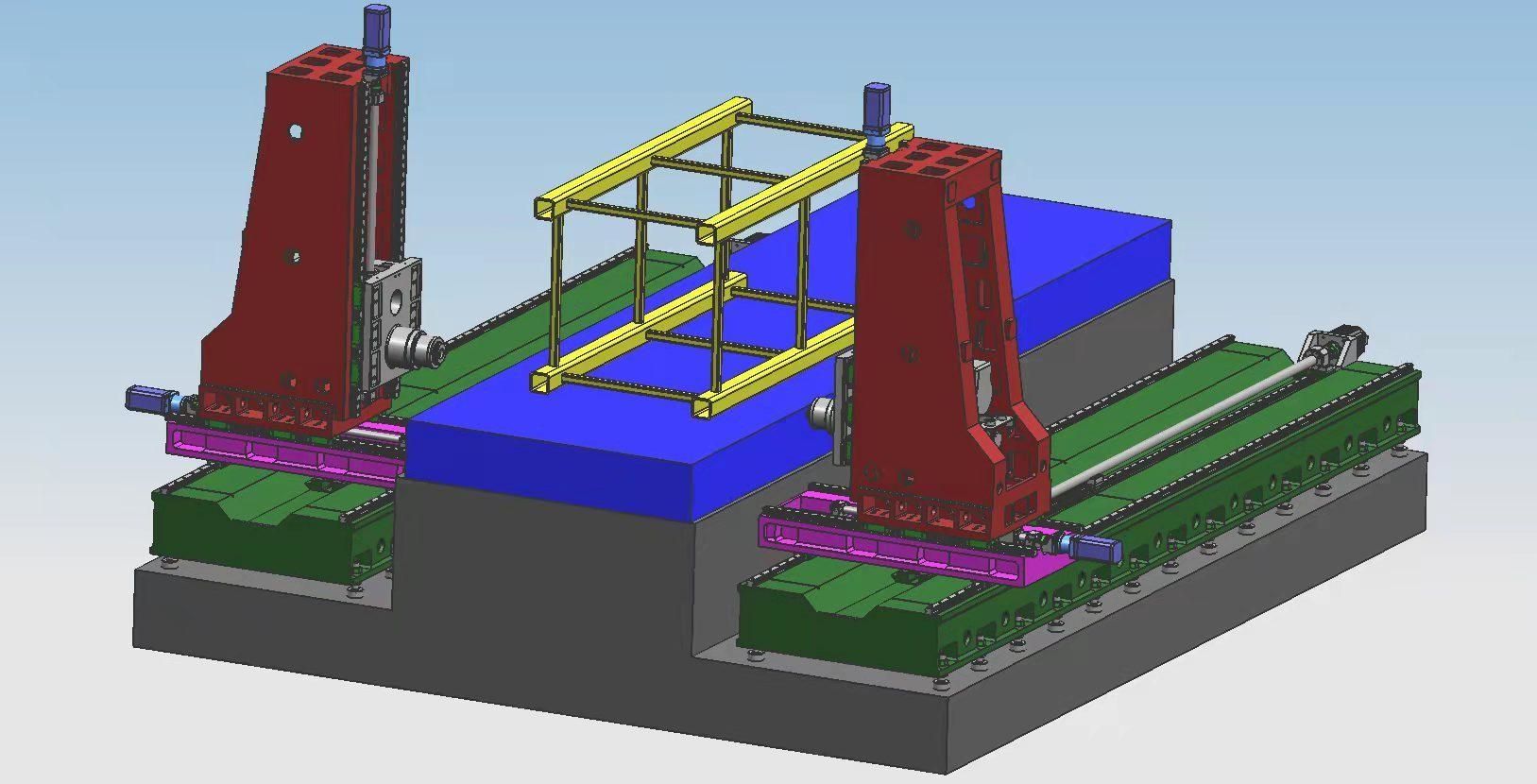
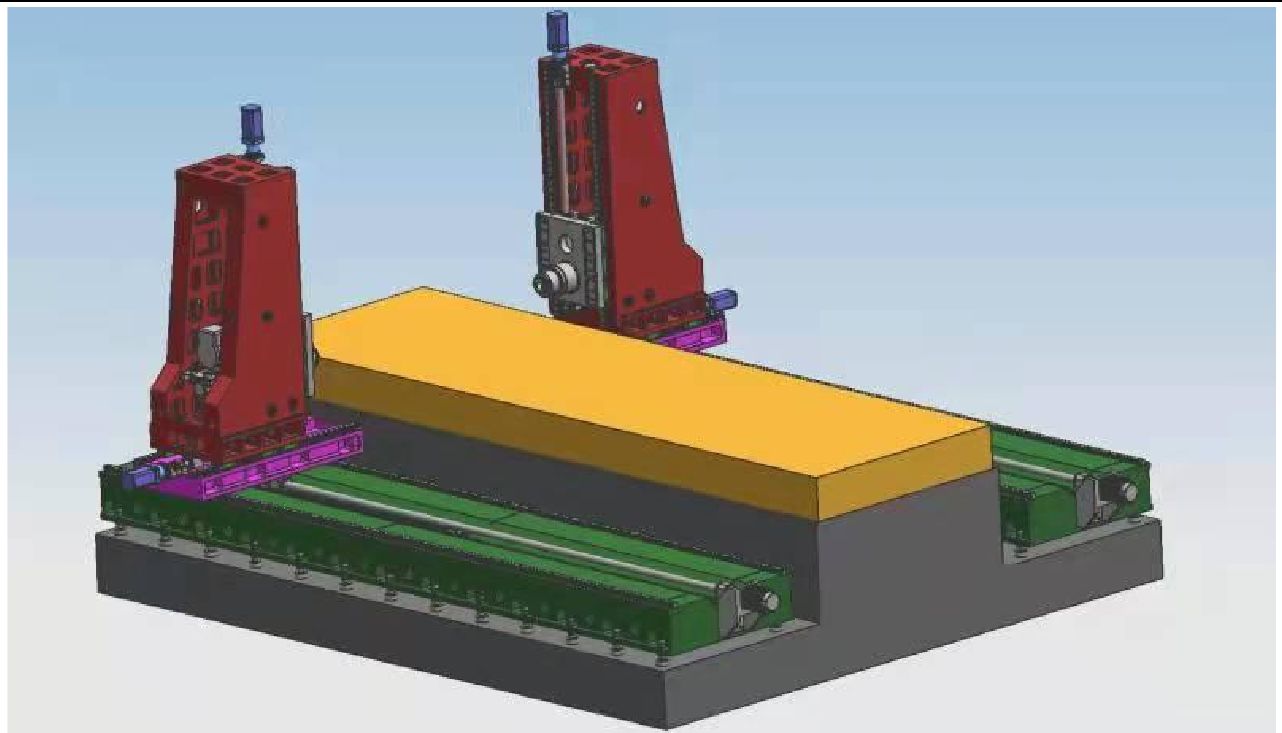
Masina põhikomponendid: alus, töölaud, vasak ja parem sammas, sadulad, tõukurid jne, suured osad on valmistatud vaiguliivavormist, kvaliteetsest hallraudsest 250 valust, lõõmutatud kuumaliivaaugus→vibratsioonvanandamine→kuum ahju lõõmutamine → vibratsiooniga vanandamine → töötlemata töötlemine → vibratsiooniga vanandamine → ahju lõõmutamine → vibratsioonivanandamine → viimistlemine, et täielikult kõrvaldada osade negatiivne pinge ja hoida osade jõudlus stabiilsena. Seadme töölaud on fikseeritud ja mõlemal küljel olevad jõupead saavad liikuda aluse ees- ja tagasuunas; Masinal on sellised funktsioonid nagu puurimine, puurimine, süvistamine, keermestamine jne. Tööriista jahutusmeetodiks on sisemine jahutus pluss väline jahutamine. Masin sisaldab 5 etteandetelge, 2 lõikejõupead, mida saab korraga sünkroniseerida 5 teljega või olla ühetoimelised. Masina ja jõupea aksiaalsuund on näidatud alloleval joonisel.
2. 2 Aksiaalse jõuülekande toiteosa põhistruktuur
2.2.1 X-telg: jõupea liigub edasi-tagasi mööda aluse juhtsiini.
X1-telje ajam: vahelduvvoolu servomootorit ja ülitäpset planetaarset reduktorit kasutatakse jõupea juhtimiseks läbi kuulkruvi, et realiseerida X-telje lineaarne liikumine.
X2-teljeline jõuülekanne: vahelduvvoolu servomootorit ja ülitäpset planetaarset reduktorit kasutatakse jõupea juhtimiseks läbi kuulkruviülekande, et realiseerida X-telje lineaarne liikumine.
Juhtsiinide vorm: Laiendatud alusele on plaaditud kaks ülitugevat täpset lineaarset juhtsiini.
2.2 Y1 telg: jõupea liigub kolonnil üles-alla edasi-tagasi.
Y1-telje ajam: Y1-telje lineaarse liikumise saavutamiseks kasutage kuulkruvi läbimiseks vahelduvvoolu servomootorit. Juhtsiinide vorm: 4 tükki 45 tüüpi lineaarseid juhtsiine.
2.2.3 Y2 telg: jõupea liigub kolonnil üles-alla.
Y2-telje jõuülekanne: vahelduvvoolu servomootorit kasutatakse kuulkruvi läbimiseks Y1-telje lineaarse liikumise saavutamiseks.
Juhtsiinide vorm: 4 tükki 45 tüüpi lineaarseid juhtsiine.
2.2.4 Z1 telg: jõupea liigub sadulal edasi-tagasi.
Z1-telje jõuülekanne: vahelduvvoolu servomootorit ja ülitäpset planetaarset reduktorit kasutatakse liikumise juhtimiseks läbi kuulkruvi, et realiseerida Z1-telje lineaarne liikumine.
2.2.5 Z2 telg: jõupea liigub sadulal edasi-tagasi.
Z2-teljeline jõuülekanne: vahelduvvoolu servomootorit ja ülitäpset planetaarset reduktorit kasutatakse liikumise juhtimiseks läbi kuulkruvi, et realiseerida Z2-telje lineaarne liikumine.
2.3. Laastude eemaldamine ja jahutamine
Töölaua alla on mõlemale küljele paigaldatud lamedad kettlaastud konveierid ning tsiviliseeritud tootmise realiseerimiseks saab raudlaastud lõpus laastukonveierile välja lasta. Laastukonveieri jahutusvedeliku paagis on jahutuspump, mida saab kasutada sisejahutuseks + tööriista välisjahutuseks, et tagada tööriista jõudlus ja kasutusiga ning jahutusvedelikku saab taaskasutada.
3. Täielik digitaalne arvjuhtimissüsteem:
3.1. Laastu purustamise funktsiooniga saab inimese ja masina liidesel seadistada laastu purunemise aega ja laastu purunemise tsüklit.
3.2. Tööriista tõstmise funktsiooniga saab tööriista tõstekaugust seadistada inimese ja masina liidesel. Kui vahemaa on saavutatud, tõstetakse tööriist kiiresti üles, seejärel visatakse laastud minema ning seejärel liigutakse kiiresti edasi puurimispinnale ja muundatakse automaatselt tööle.
3.2. Tsentraliseeritud juhtimispult ja käeshoitav seade kasutavad arvjuhtimissüsteemi ning on varustatud USB-liidese ja vedelkristallekraaniga LCD-ekraaniga. Programmeerimise, salvestamise, kuvamise ja suhtluse hõlbustamiseks on tööliidesel sellised funktsioonid nagu inimese ja masina dialoog, veakompensatsioon ja automaatne häire.
3.2.. Seadmel on enne töötlemist augu asukoha eelvaate ja uuesti kontrollimise funktsioon ning toiming on väga mugav.
4. Automaatne määrimine
Masina täpsed lineaarsed juhtrööpa paarid, täppiskuulkruvi paarid ja muud ülitäpsed liikumispaarid on varustatud automaatsete määrimissüsteemidega. Automaatne määrdepump väljastab surveõli ja kvantitatiivne määrdeõlikamber siseneb õli. Kui õlikamber on õliga täidetud ja süsteemi rõhk tõuseb 1,4–1,75 Mpa-ni, suletakse süsteemi rõhulüliti, pump seiskub ja tühjendusklapp tühjeneb samal ajal. Kui õlirõhk teel langeb alla 0,2 Mpa, hakkab kvantitatiivne määrdeseade täitma määrimispunkti ja lõpetab ühe õlitäitmise. Tänu kvantitatiivse õlitaja poolt tarnitavale täpsele õlikogusele ja võimalusele tuvastada süsteemi rõhku, on õlivarustus usaldusväärne ja tagab, et iga kinemaatilise paari pinnal on õlikile, mis vähendab hõõrdumist ja kulumist ning väldib kahjustusi. ülekuumenemisest põhjustatud sisestruktuurile. , et tagada masina täpsus ja tööiga.
5. Masinkasutuskeskkond:
Toide: Kolmefaasiline AC380V±10%, 50Hz±1 Ümbritseva temperatuur: -10°~ 45°
6. Vastuvõtmise kriteeriumid:
JB/T10051-1999 "Metallilõikemasinate hüdraulilise süsteemi üldised tehnilised kirjeldused"
7. Tehnilised parameetrid:
| Mudel | 2050-5Z | |
| Töödeldava tooriku maksimaalne suurus | Pikkus × laius × kõrgus (mm) | 5000 × 2000 × 1500 |
| töölaua suurus | Pikkus X Laius (mm) | 5000*2000 |
| Jõupea aluse suuna liikumine | Edasi-tagasi liikumine (mm) | 5000 |
| Toitepea üles ja alla | Rammi käik üles ja alla (mm) | 1500 |
|
Horisontaalne ram-tüüpi puurimispea Jõupea 1 2 | Kogus (2 tk) | 2 |
| Spindli koonus | BT50 | |
| Puuri läbimõõt (mm) | Φ2-Φ60 | |
| Keerme läbimõõt (mm) | M3-M30 | |
| Spindli kiirus (r/min) | 30-3000 | |
| Servo spindli mootori võimsus (kw) | 22*2 | |
| Vasak ja parem käik (mm) | 600 | |
| Kahesuunalise positsioneerimise täpsus | 300mm * 300mm | ±0,025 |
| Kahesuunaline korduspositsioneerimise täpsus | 300mm * 300mm | ±0,02 |





