Vastupidise peaga puurimisfrees BOSM-1601
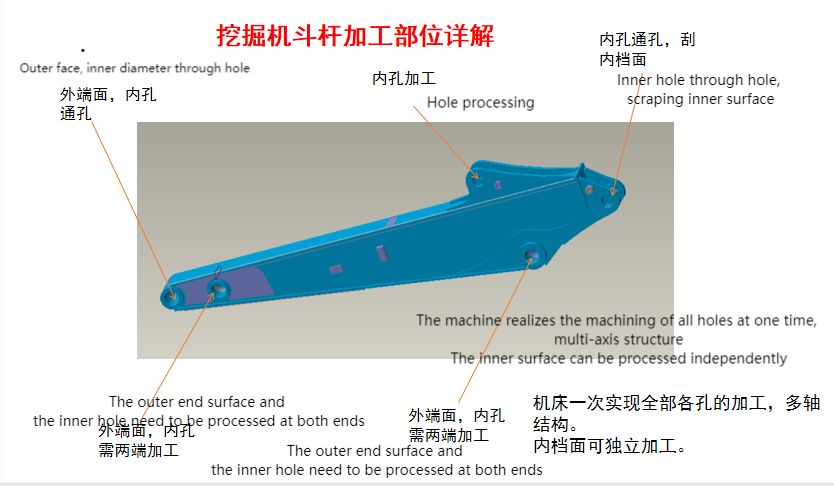
1. Seadmete kasutamine
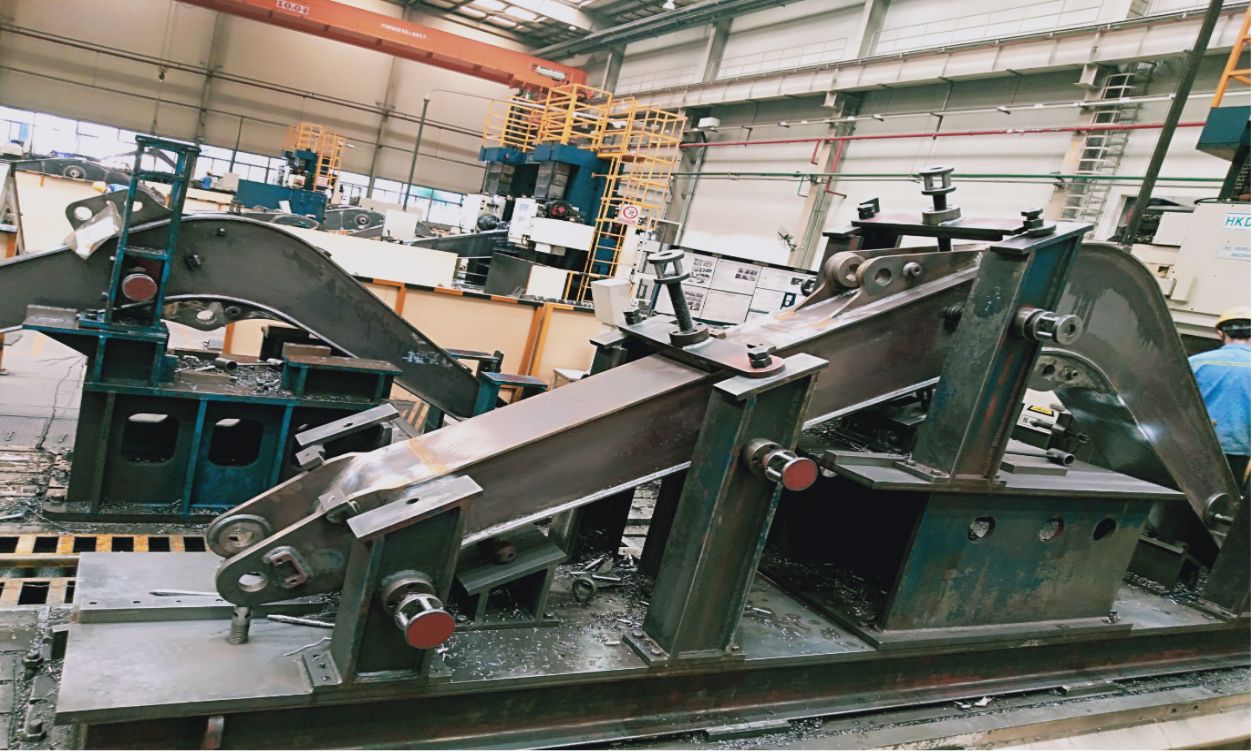
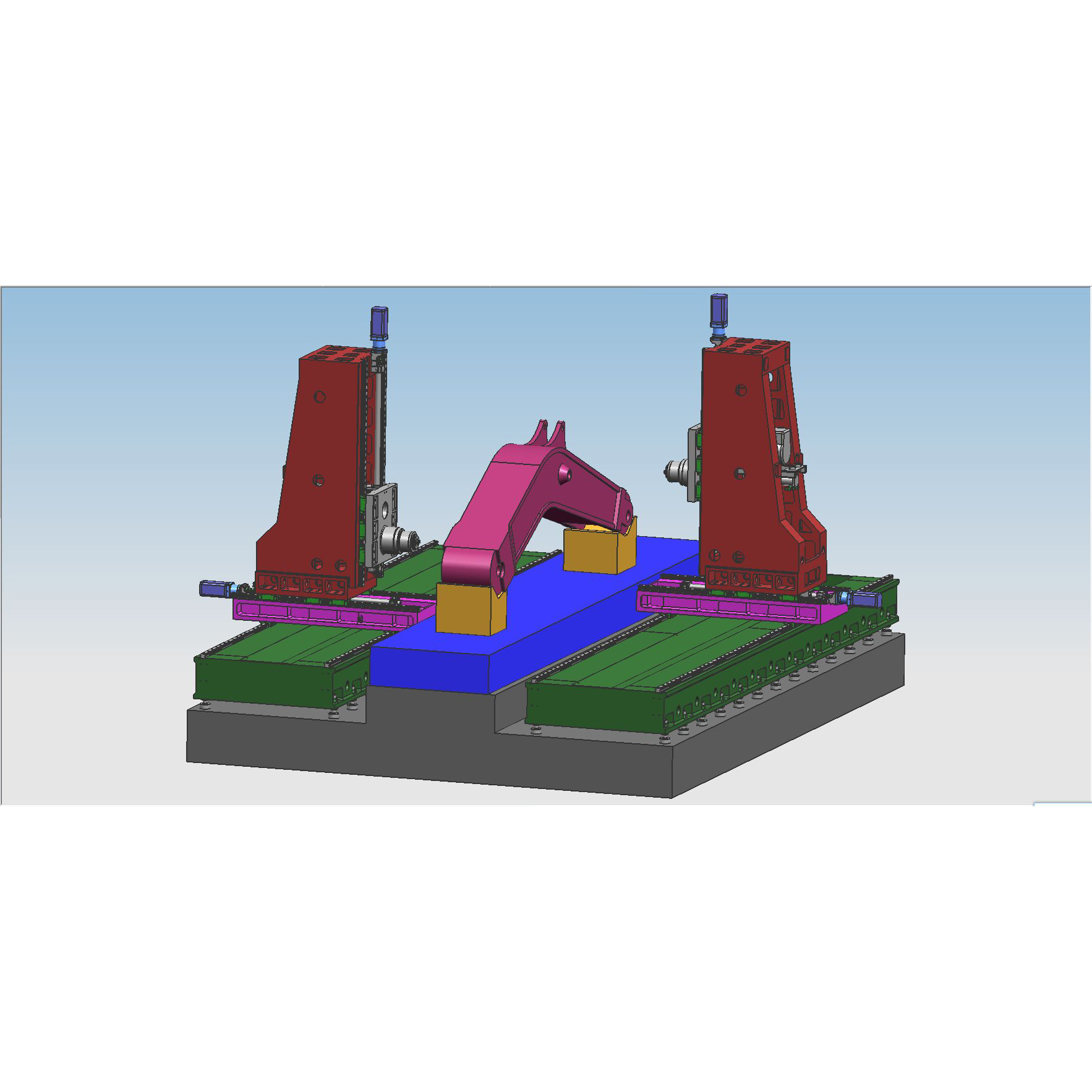
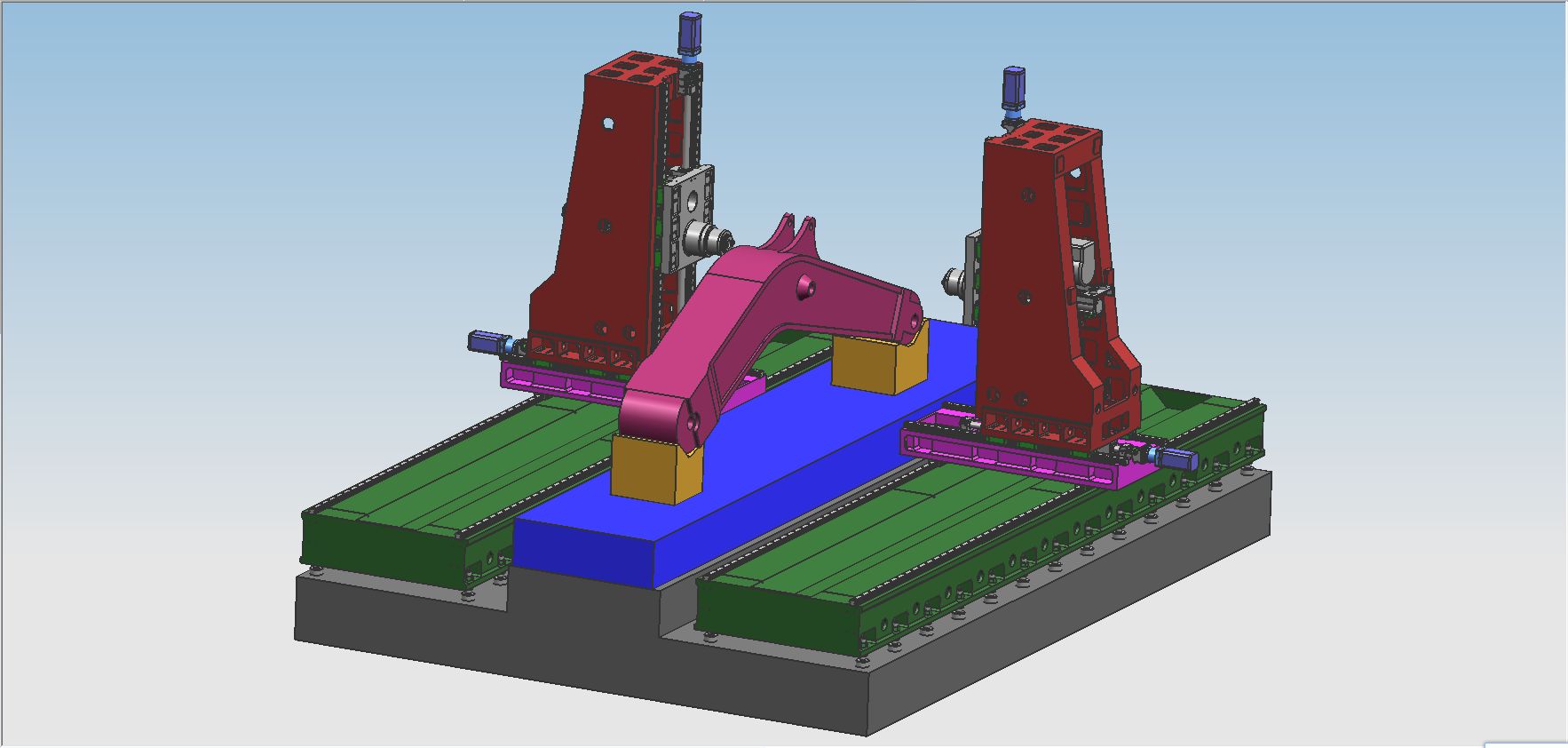
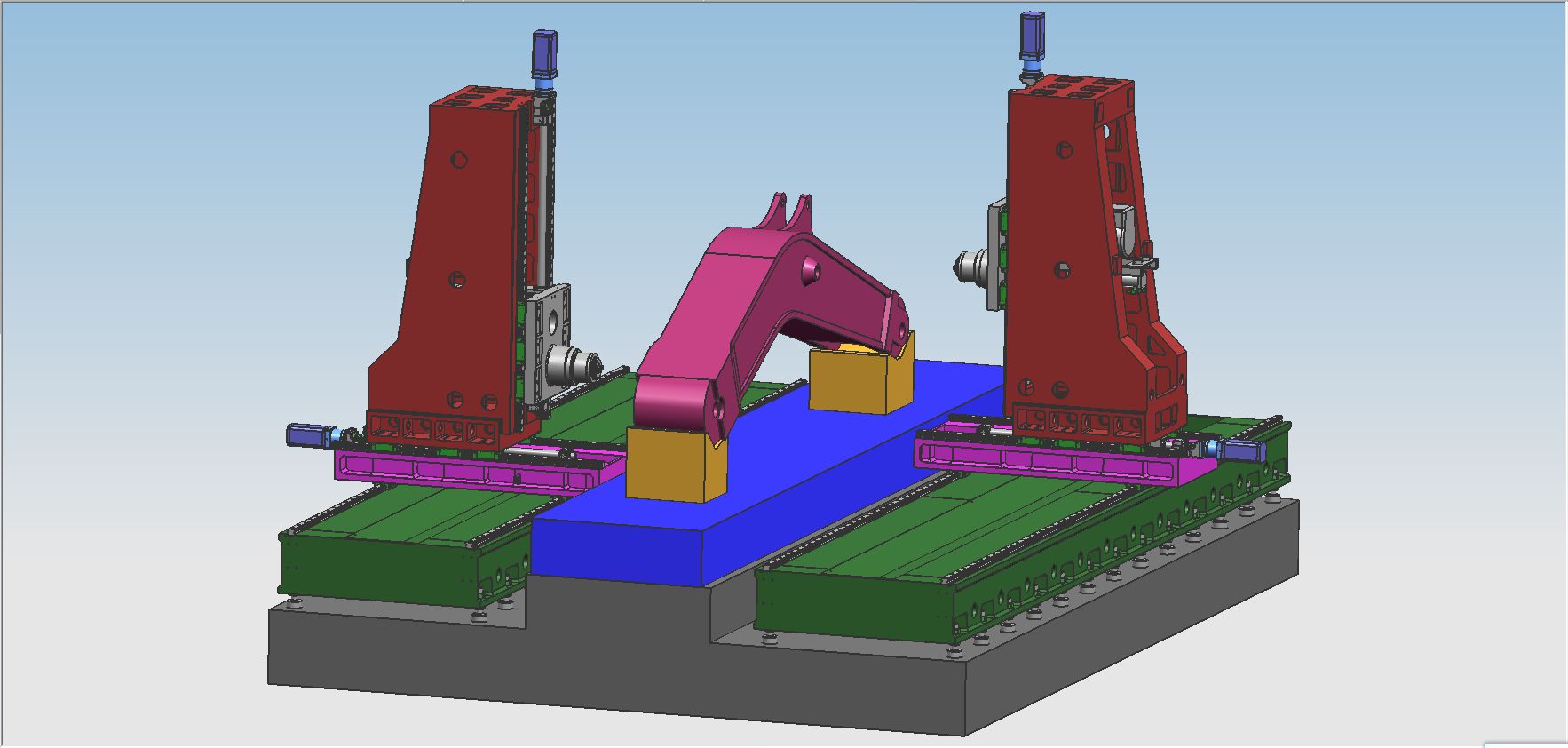
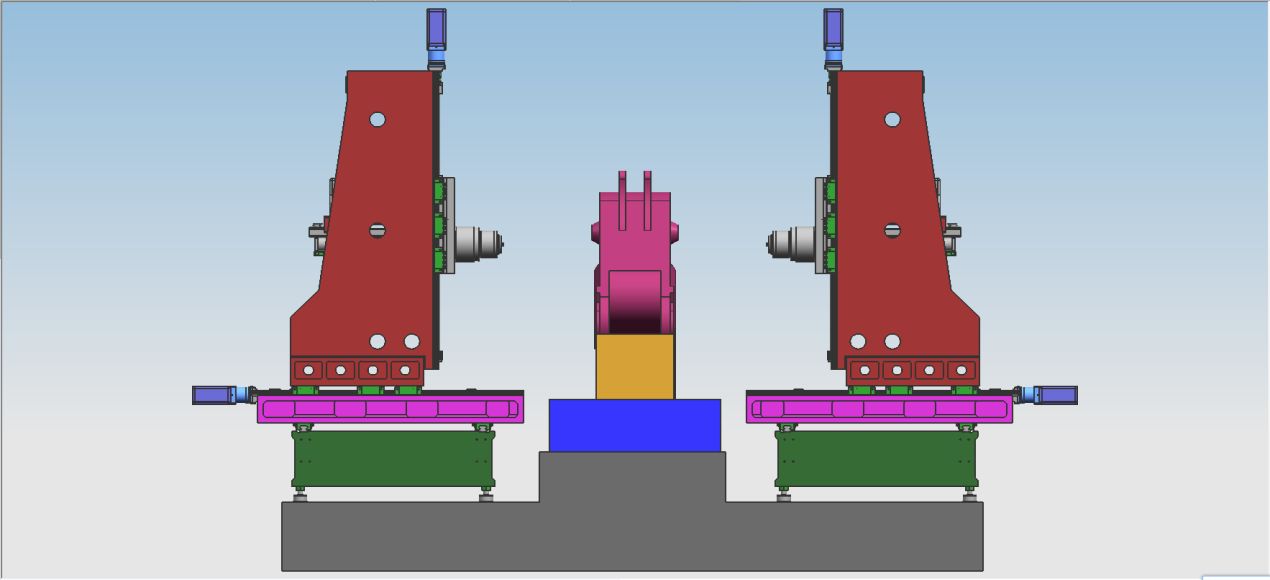
BOSM-1601 kahekohaline arvjuhtimiskolonni mobiilne kahe sambaga puurimis- ja freespink on spetsiaalne masin ehitusmasinate sümmeetriliste toorikute jaoks. Masin on varustatud spetsiaalsete liigutatavate sammaste ja kahe horisontaalse silindrite komplektiga, mis võimaldavad töödeldava detaili puurimist, freesimist, puurimist ja muud töötlemist efektiivse käiguvahemiku piires, töödeldavat detaili saab töödelda paigal korraga (pole vaja sekundaarset tööd kinnitus), kiire laadimis- ja mahalaadimiskiirus, kiire positsioneerimiskiirus, kõrge töötlemise täpsus ja kõrge töötlemise efektiivsus.
2. Masina põhikomponendid
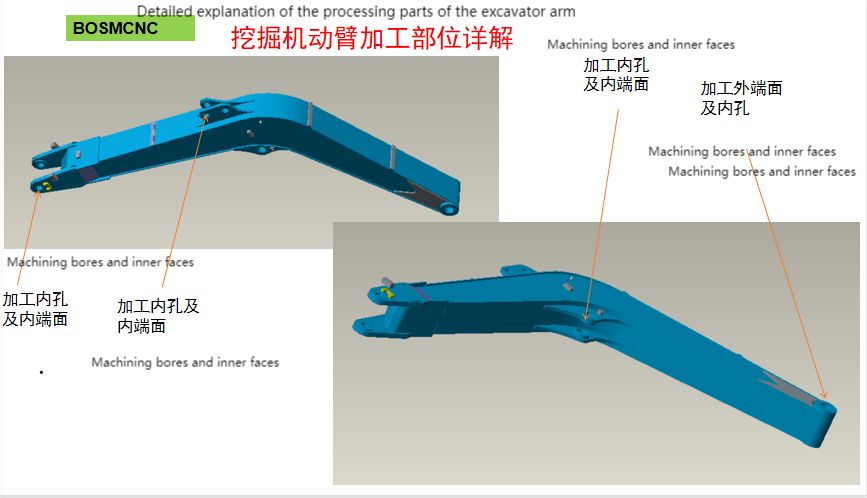
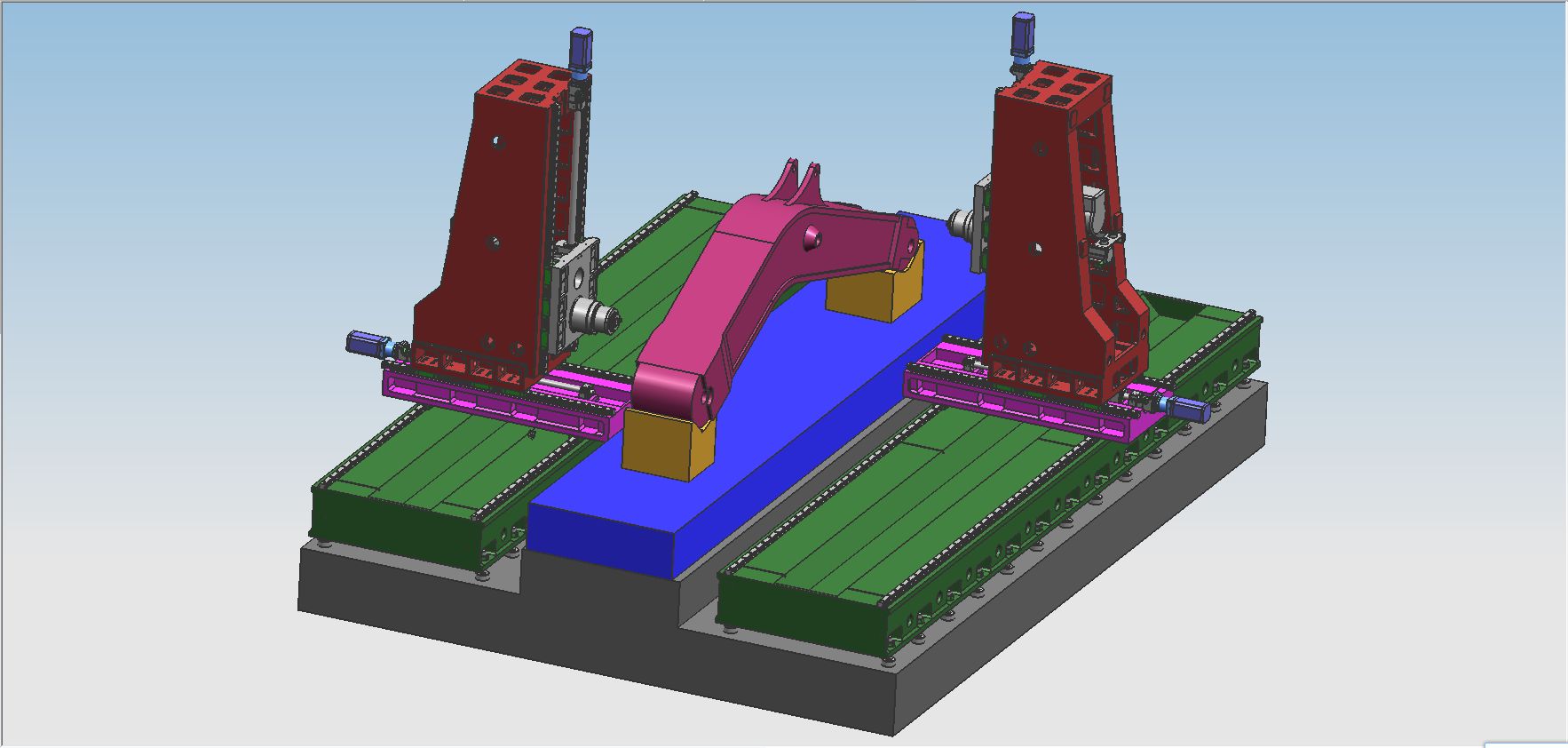
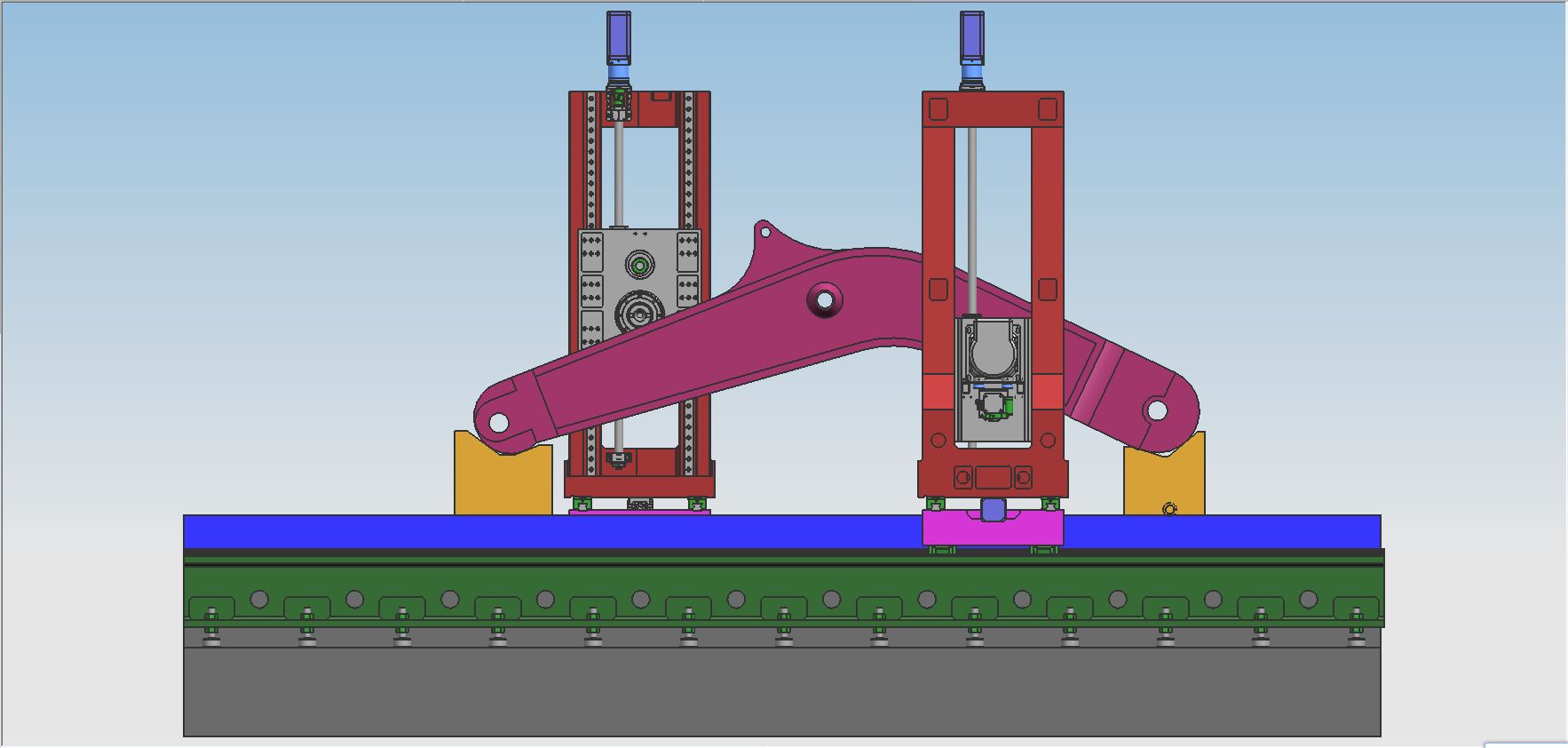
Voodi, töölaud, vasak- ja parempoolsed sambad, talad, sadulad, rammid ja muud suured osad on kõik valmistatud vaik-liivavormist, kvaliteetsest hallraudsest 250-valust, lõõmutatud kuumaliivaaugus → vibratsioonivanandamine → kuumahju lõõmutamine → vibratsioonivanandamine → töötlemata töötlemine → Vibratsiooniga vanandamine → kuuma ahju lõõmutamine → vibratsiooniga vanandamine → viimistlus, kõrvaldab täielikult osade negatiivse pinge ja hoiab osade jõudlust stabiilsena. Masinal on sellised funktsioonid nagu freesimine, puurimine, puurimine, süvendamine, keermestamine jne ning tööriista jahutusmeetodiks on väline jahutus, masin sisaldab 6 toitetelge, mis võivad realiseerida 4-teljelise ühenduse ja 6-teljelise ühetoimelise. Toitepead on 2. Masina ja jõupea aksiaalsuund on näidatud alloleval joonisel.
2.1Aksiaalse jõuülekande toiteosa põhistruktuur
2.1.1 X1/X2 telg:Kolonn liigub pikisuunas edasi-tagasi piki fikseeritud voodi juhtsiini.
X-telje jõuülekanne: vahelduvvoolu servomootoriga juhitav ja juhitav ülitäpne planetaarne reduktor juhib kahte kolonni, et liikuda lineaarselt piki X-telge läbi kuulkruvi ülekandepaari.
Juhtrööpa vorm: kaks ülitugevat täppisjoonelist juhtrööpa on lamedale asetatud. Käigupaari kuulkruvi täpsusaste on C5.
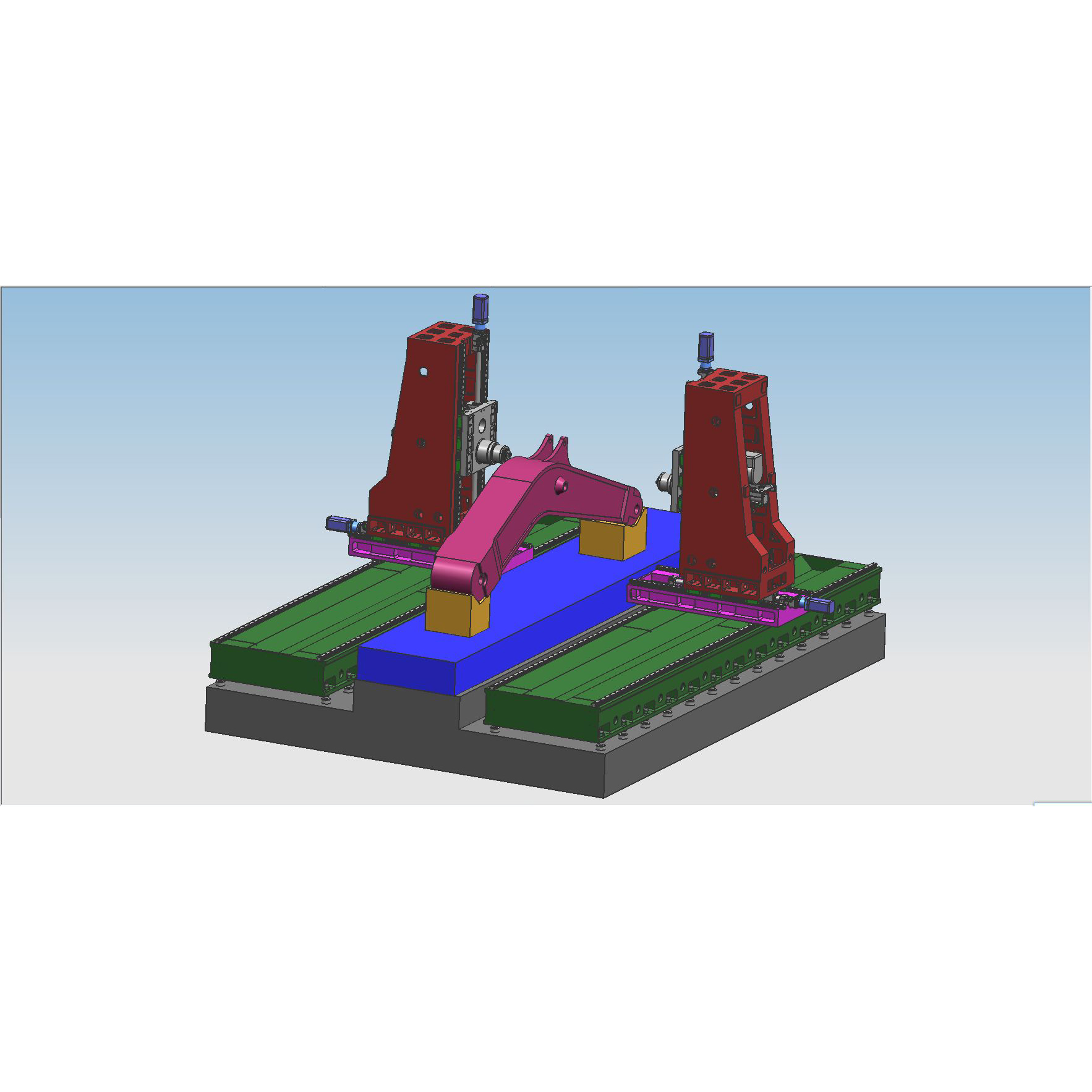
2.1.2 Y1/Y2 telg:Puurimis- ja freesimisjõupead I, II ja nende sambad paigaldatakse vastavalt mõlemale küljele ülitugevatele aluse juhtsiinidele ning liiguvad edasi-tagasi mööda aluse juhtsiine mööda Y1 ja Y2 telge. Vahelduvvoolu servomootorit kasutatakse kuulkruvi ülekandepaari juhtimiseks ja juhtimiseks, sadula liikumiseks lohistamiseks ja Y-telje lineaarse liikumise realiseerimiseks.
Juhtsiinide vorm: 4 lineaarset juhtsiini + kuulkruvi ajam. Ülekandepaari kuulkruvi täpsusaste on C5 ja poolsuletud ahelaga juhtimine on vastu võetud.
2.1.3 Z1/Z2 telg:Puurimis- ja freesimisjõupead I, II ja nende libisevad sadulad paigaldatakse vertikaalselt mõlema külje sammaste esiotstele ning liiguvad mööda Z1 ja Z2 telge mööda samba juhtrööpaid üles ja alla.
Z1-telje jõuülekanne: vahelduvvoolu servomootorit kasutatakse ülitäpse planetaarse reduktori ja kuulkruvi ülekandepaari juhtimiseks ja juhtimiseks ning silindrit liigutatakse lineaarselt mööda Z-telge.
Juhtrööpa vorm: kasutatakse 2 lineaarset juhtrööpa konstruktsiooni. Käigupaari kuulkruvi täpsusaste on C5.
2.2 Laastude eemaldamine ja jahutamine
Töölaua alla on mõlemale küljele paigaldatud spiraalsed ja lame kett laastkonveierid ning tsiviliseeritud tootmise realiseerimiseks saab laastud lõpus automaatselt laastkonveierile transportida läbi kahe spiraal- ja kettplaatide etapi. Laastukonveieri jahutusvedeliku paagis on jahutuspump, mida saab kasutada tööriista väliseks jahutamiseks, et tagada tööriista jõudlus ja kasutusiga ning jahutusvedelikku saab taaskasutada.
3. Täielik digitaalne arvjuhtimissüsteem:
3.1. Laastu purustamise funktsiooniga saab inimese ja masina liidesel seadistada laastu purunemise aega ja laastu purunemise tsüklit.
3.2. Tööriista tõstmise funktsiooniga varustatud tööriista tõstekaugust saab seadistada inimese ja masina liidesel. Kui kaugus on saavutatud, tõstetakse tööriist kiiresti üles, seejärel visatakse laastud minema ja seejärel suunatakse see kiiresti edasi puurimispinnale ja muundatakse automaatselt tööle.
3.3. Tsentraliseeritud juhtimispult ja käeshoitav seade kasutavad arvjuhtimissüsteemi ning on varustatud USB-liidese ja vedelkristallkuvariga. Programmeerimise, salvestamise, kuvamise ja suhtluse hõlbustamiseks on tööliidesel sellised funktsioonid nagu inimese ja masina dialoog, veakompensatsioon ja automaatne häire.
3.4. Seadmel on enne töötlemist augu asukoha eelvaate ja uuesti kontrollimise funktsioon ning toiming on väga mugav.
4. Automaatne määrimine
Masina täpsed lineaarsed juhtrööpa paarid, täppiskuulkruvi paarid ja muud ülitäpsed liikumispaarid on varustatud automaatsete määrimissüsteemidega. Automaatne määrdepump väljastab surveõli ja kvantitatiivne määrdeõlikamber siseneb õli. Pärast õlikambri täitmist õliga, kui süsteemi rõhk tõuseb 1,4–1,75 Mpa-ni, suletakse süsteemi rõhulüliti, pump seiskub ja tühjendusklapp tühjeneb samal ajal. Kui õlirõhk teel langeb alla 0,2 Mpa, hakkab kvantitatiivne määrdeseade täitma määrimispunkti ja lõpetab ühe õlitäitmise. Tänu kvantitatiivse õlipihusti täpsele õlivarustusele ja süsteemi rõhu tuvastamisele on õlivarustus usaldusväärne, tagades iga kinemaatilise paari pinnale õlikile, vähendades hõõrdumist ja kulumist ning vältides seadme kahjustamist. ülekuumenemisest põhjustatud sisemine struktuur. , et tagada masina täpsus ja tööiga. Võrreldes libiseva juhtrööpa paariga on selles masinas kasutataval veereval lineaarsel juhtrööpa paaril mitmeid eeliseid:
① Suur liikumistundlikkus, veereva juhtrööpa hõõrdetegur on väike, ainult 0,0025–0,01, ja veojõud on oluliselt vähenenud, mis on võrdne ainult 1 tavalise masinaga. /10.
② Dünaamilise ja staatilise hõõrdumise erinevus on väga väike ning järeltulemus on suurepärane, see tähendab, et ajavahemik sõidusignaali ja mehaanilise tegevuse vahel on äärmiselt lühike, mis aitab parandada reageerimiskiirust ja tundlikkust. arvjuhtimissüsteem. ③ See sobib suure kiirusega lineaarseks liikumiseks ja selle hetkekiirus on umbes 10 korda suurem kui libisevatel juhtsiinidel. ④ See võib realiseerida lünkadeta liikumise ja parandada mehaanilise süsteemi liikumise jäikust. ⑤ Professionaalsete tootjate toodetud see on suure täpsusega, hea mitmekülgsusega ja hõlpsasti hooldatav.
5. Masina kasutuskeskkond:
5.1. Seadmete kasutamise keskkonnanõuded
Konstantse ümbritseva keskkonna temperatuuri taseme hoidmine on täppistöötluse oluline tegur.
(1) Saadaolevad välistemperatuuri nõuded on -10 °C kuni 35 °C, kui ümbritseva õhu temperatuur on 20 °C, peaks õhuniiskus olema 40–75%.
(2) Masina staatilise täpsuse kindlaksmääratud vahemikus hoidmiseks peab optimaalne ümbritseva õhu temperatuur olema 15 °C kuni 25 °C ja temperatuuride erinevus
Ei tohi ületada ±2°C/24h.
5.2 Toitepinge: 3-faasiline, 380V, pinge kõikumine ±10% piires, toite sagedus: 50HZ.
5.3 Kui pinge tööpiirkonnas on ebastabiilne, peaks masin olema varustatud stabiliseeritud toiteallikaga, et tagada masina normaalne töö.
5.4 Masinal peab olema usaldusväärne maandus: maandusjuhe on vasktraat, traadi läbimõõt ei tohi olla väiksem kui 10 mm² ja maandustakistus on väike kuni 4 oomi.
5.5 Seadme normaalse töövõime tagamiseks, kui õhuallika suruõhk ei vasta õhuallika nõuetele, tuleks see Masinale paigaldada.
Enne õhku lisage õhupuhastusseadme komplekt (kuivatamine, rasvaärastus, filtreerimine).
5.6 Hoidke seadet eemal otsesest päikesevalgusest, vibratsiooni- ja soojusallikatest, kõrgsagedusgeneraatoritest, elektrikeevitusmasinatest jne, et vältida masina tootmise rikkeid või masina täpsuse kaotust.
6. Tehnilised parameetrid
| Mudel | 1601 | |
| Töödeldava detaili suurus | Pikkus × laius × kõrgus (mm) | 16000×1000×1500 |
| Masina maksimaalne etteanne | Laius (mm) | 1300 |
| Töölaua suurus | Pikkus X Laius (mm) | 16000*1000 |
| Kolonnireis | Veeru liigutamine edasi-tagasi (mm) | 1600 |
| Spindel üles ja alla | Liikumine üles ja alla (mm) | 1500 |
| Kõrgus spindli keskpunktist laua tasapinnani | 100-1600 mm | |
| Horisontaalne suure tugevusega spindel võimsus pea üks kaks | Kogus (2) | 2 |
| Spindli koonus | BT50 | |
| Broach | Automaatne avamine, käsitsi tööriistavahetus | |
| Lõikuri läbimõõt (mm) | ≤Φ200 | |
| Keerme läbimõõt (mm) | M3-M30 | |
| Spindli kiirus (r/min) | 30-3000 | |
| Servo spindli mootori võimsus (kw) | 30*2 | |
|
| Kahe spindli otsa vaheline vasak ja parem käiguvahe | 400-1600 mm |
| Kahekordsete sammaste vasak ja parem käik (mm) | 600 igaüks | |
| Tööriista jahutus | Sisemine jahutus, välimine jahutus | |
| Kahesuunalise positsioneerimise täpsus | 300 mm | ±0,032 |
| Kahesuunaline korduspositsioneerimise täpsus | 300 mm | ±0,025 |
| Masina mõõtmed | Pikkus × laius × kõrgus (mm) | Vastavalt joonistele (kui projekteerimisprotsessis on muudatusi, anname sellest teada) |
| Brutokaal (t) | 72T | |