BOSM -12010 vastandpeaga puurimisfrees
1. Kasutaminemasin :
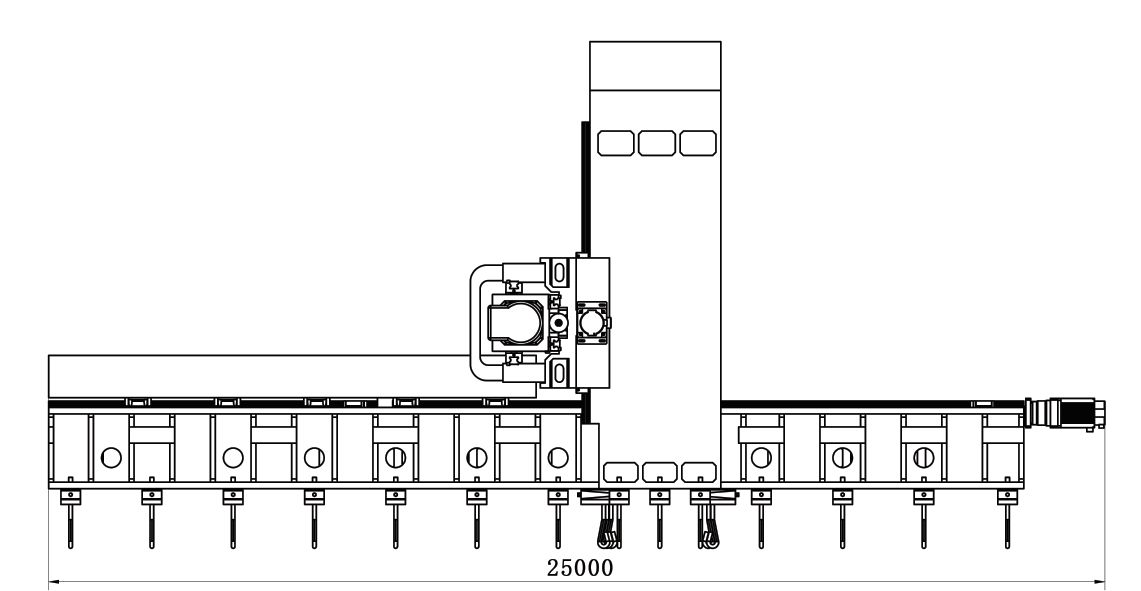
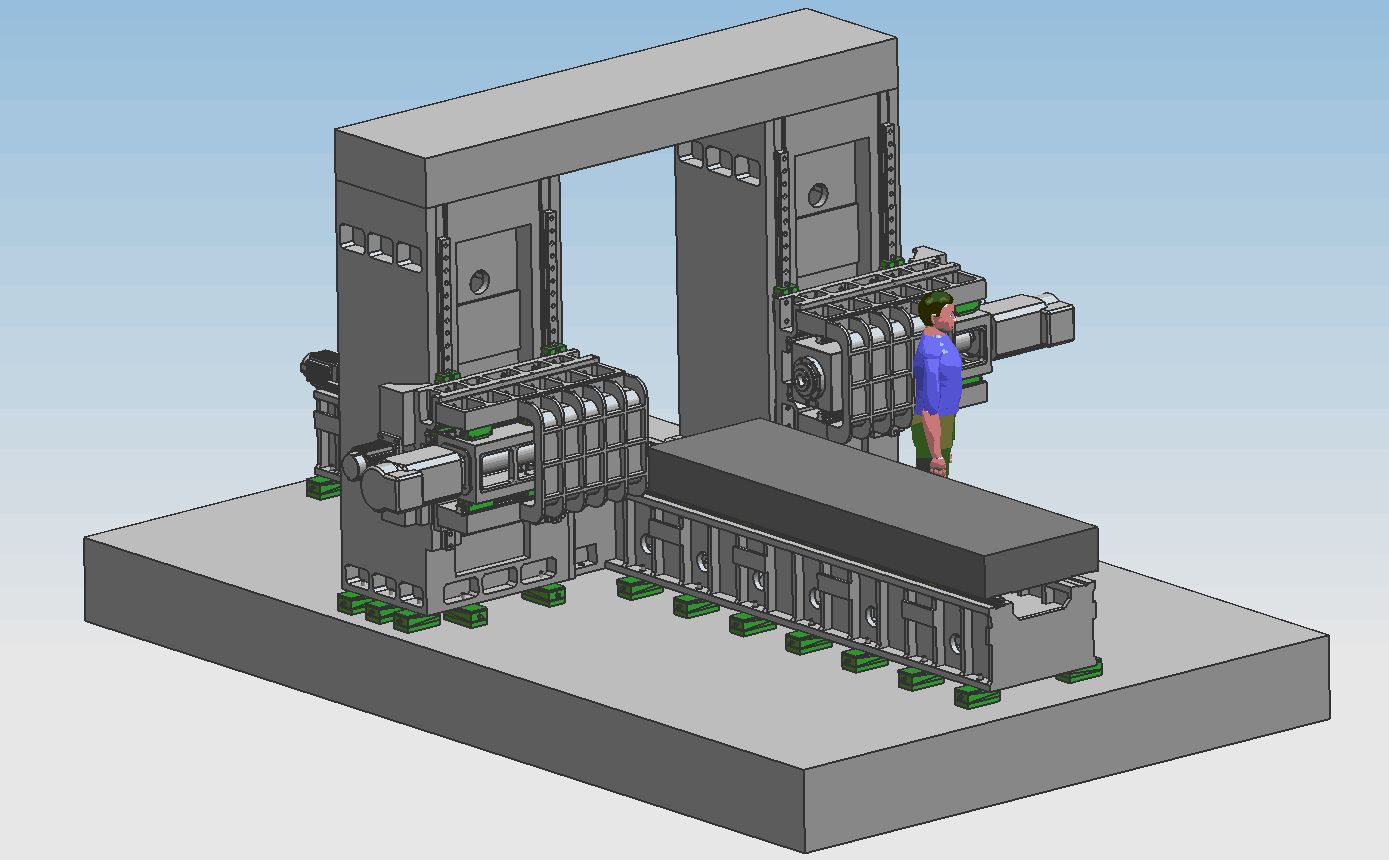
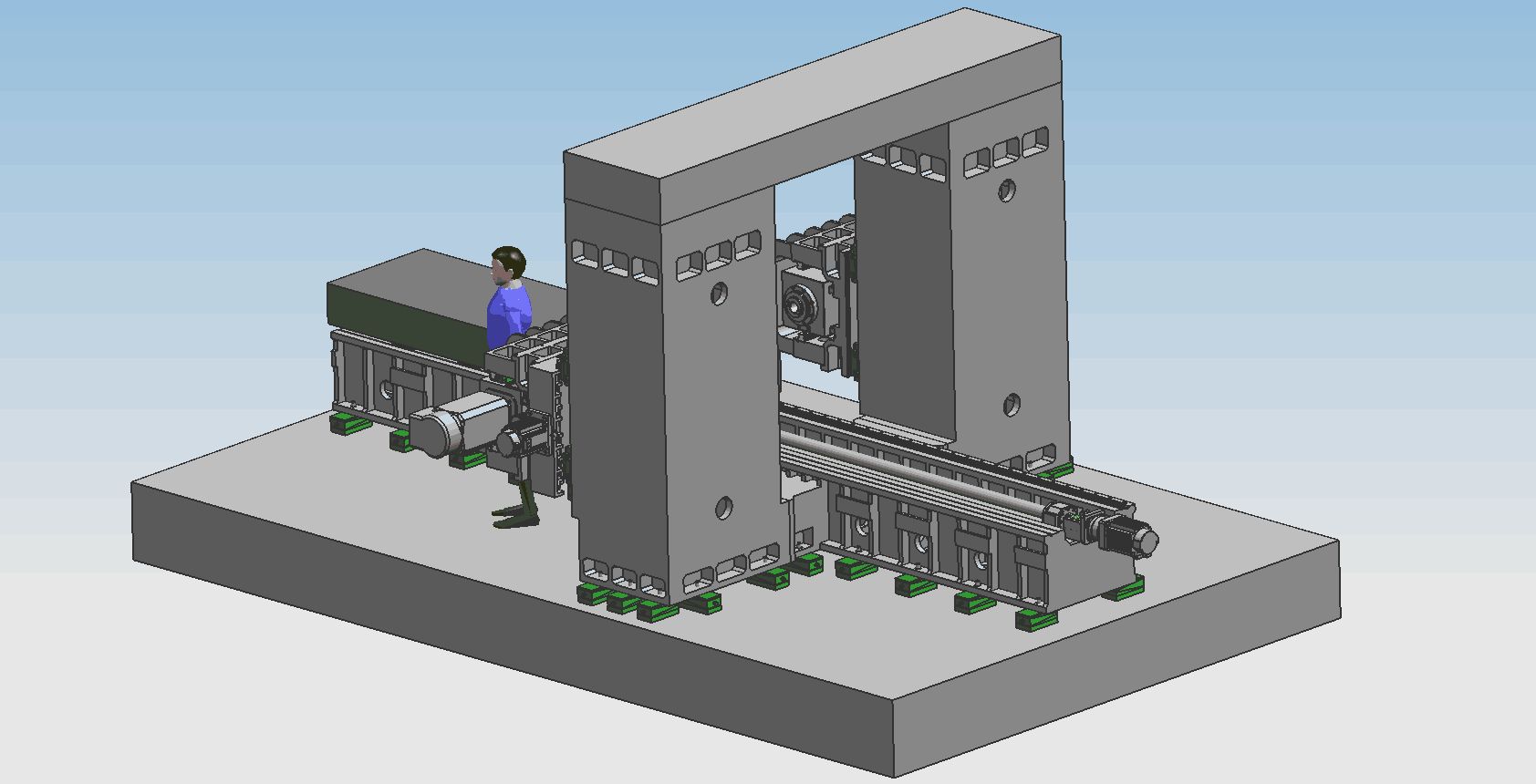
BOSM- 12000* 1000 fikseeritud tala CNC-pukk-topeltsambaga puurimis- ja freespink on spetsiaalne tööpink ekskavaatori hoobade/pulkade töötlemiseks. Padi, saab töödelda tooriku kiiret töötlemist, töödeldavat detaili saab puurida, freesida ja puurida efektiivses käiguvahemikus, töödeldavat detaili saab töödelda korraga (pole vaja teisest kinnitust), laadimis- ja mahalaadimiskiirus on kiire, positsioneerimiskiirus on kiire ja töötlemise täpsus on kõrge. Kõrge, kõrge töötlemise efektiivsus.
2.Masina struktuurfunktsioonid:
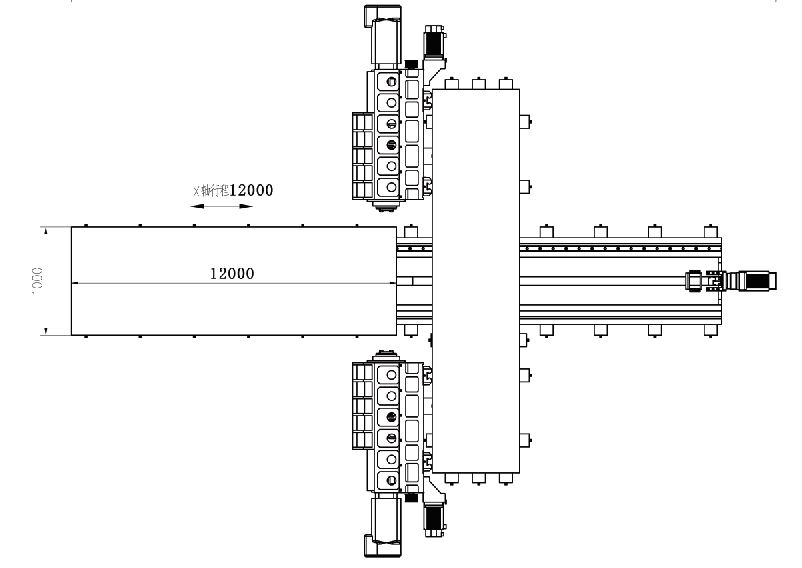
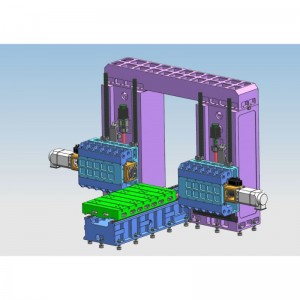
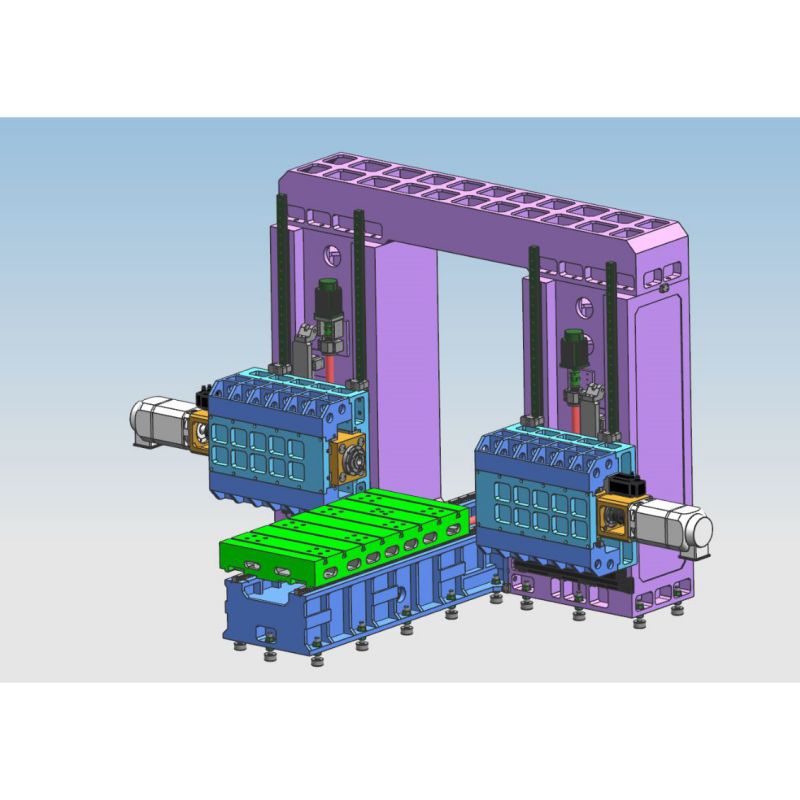
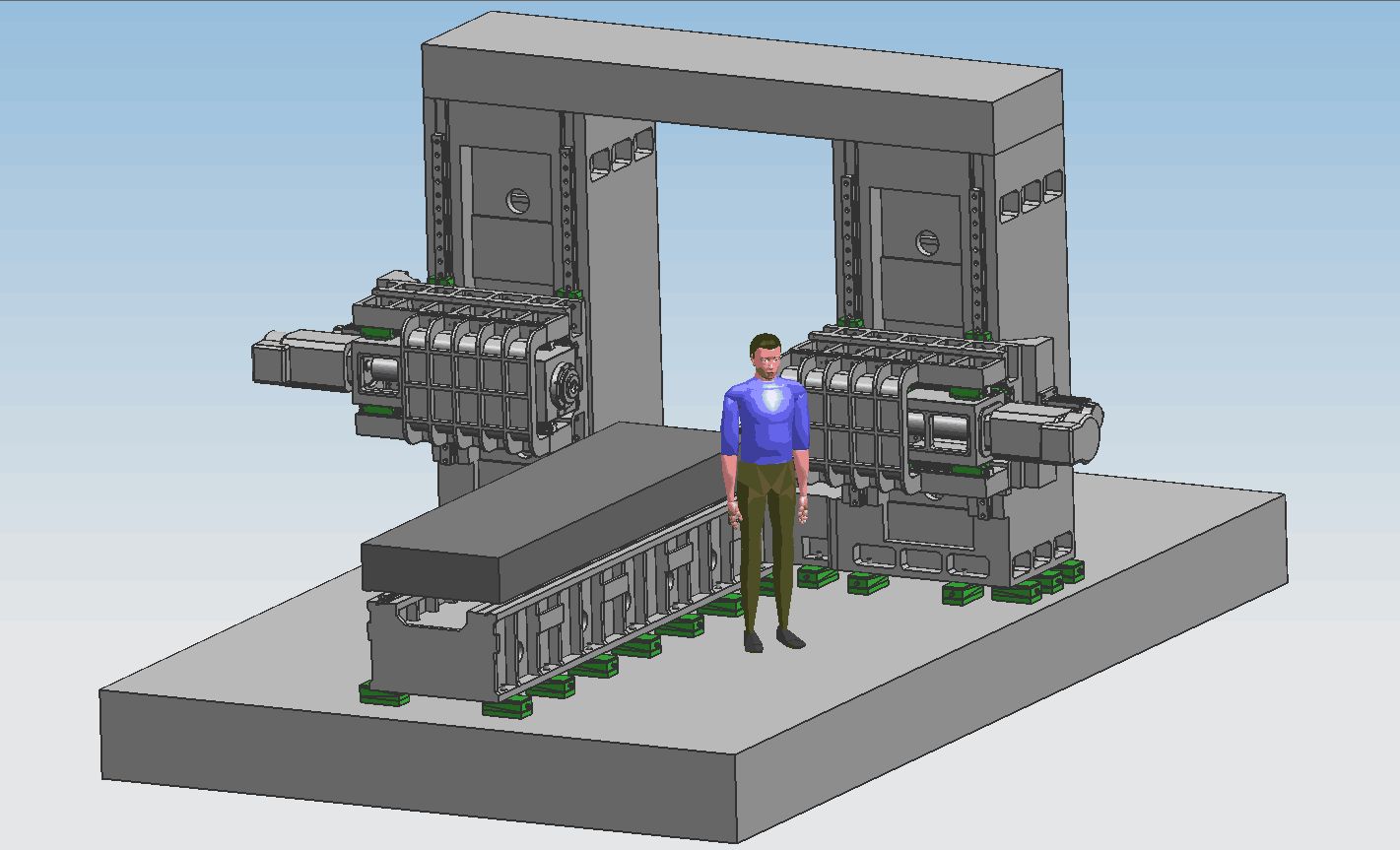
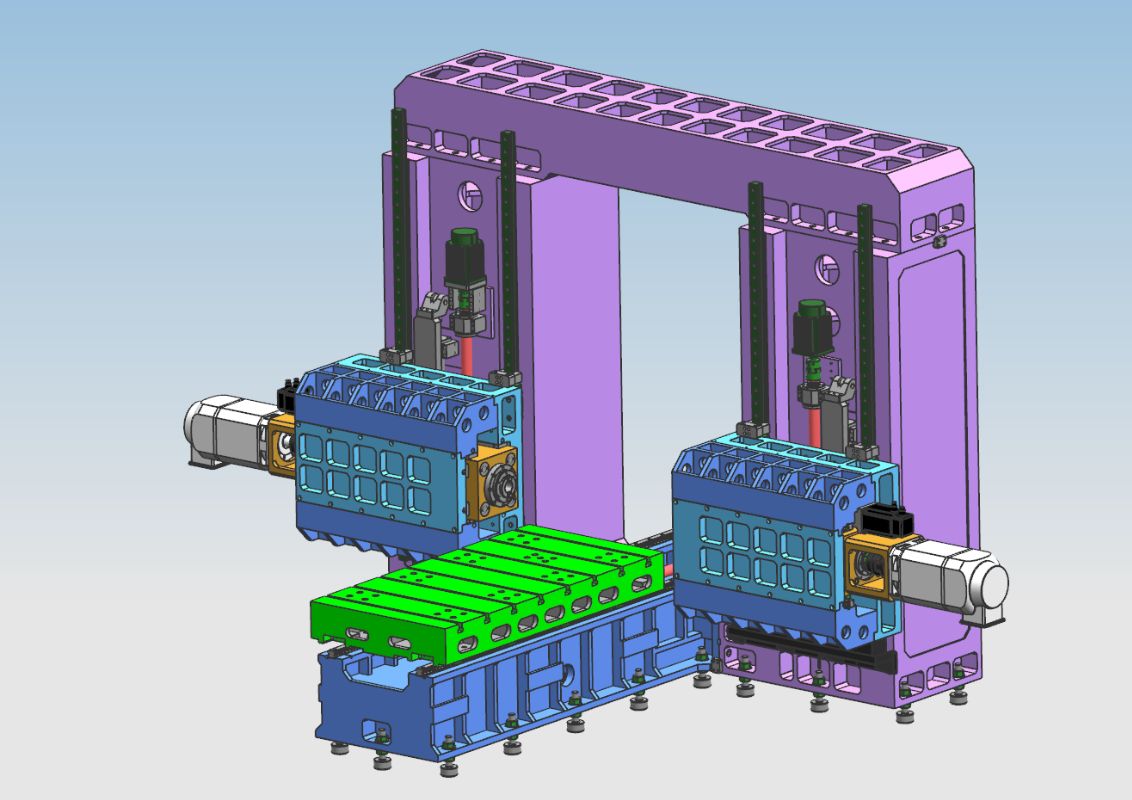
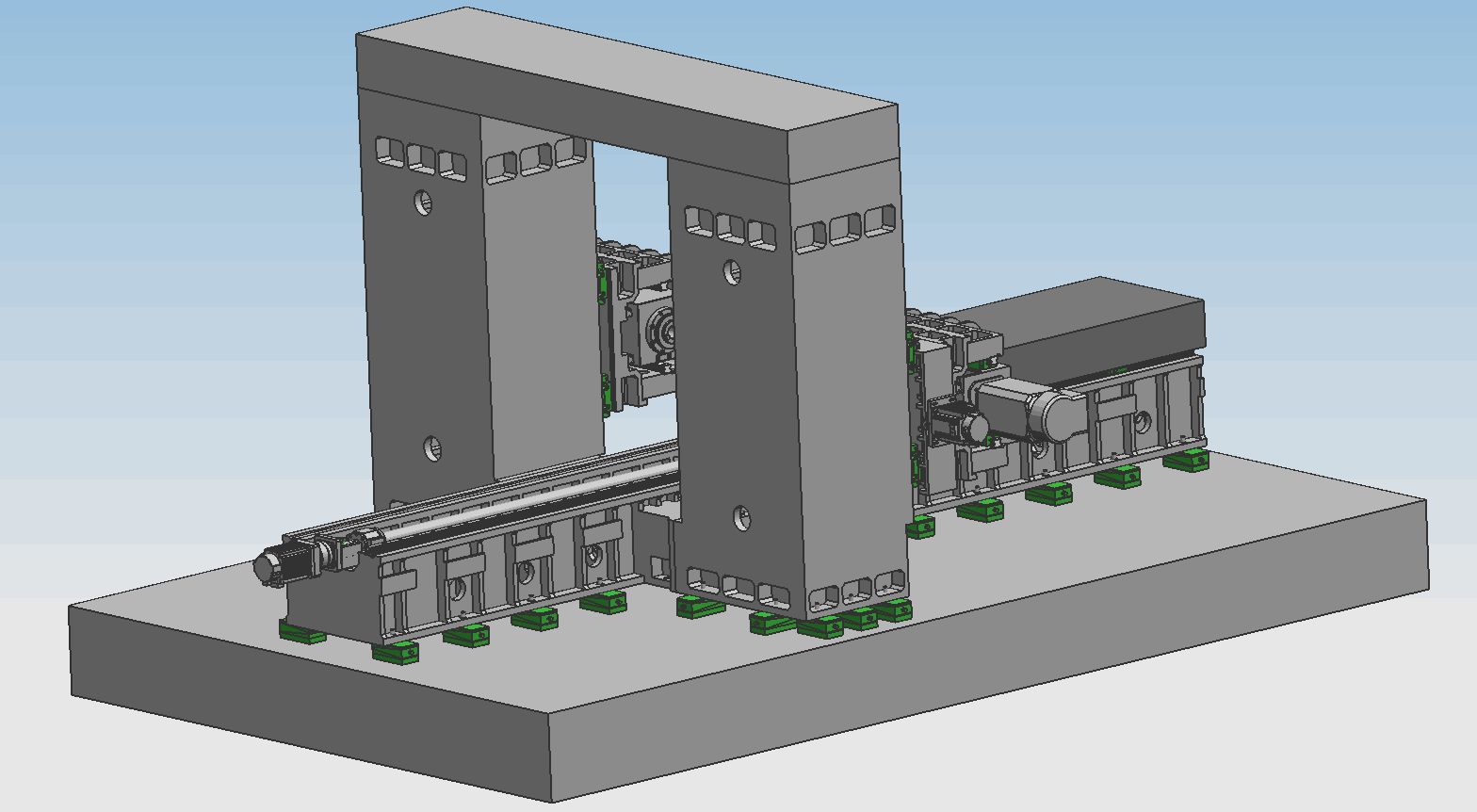
Tööpingi põhikomponendid: voodi, töölaud, vasak ja parem sammas, talad, pukk-ühendustalad, sadulad, rammid jne, suured osad on valmistatud vaiguliivvormist, kvaliteetne hallraud 250 valu, kuumlõõmutatud liivaaev → vibratsioonivanandamine → kuumtöötlus Ahju lõõmutamine → vibratsioonivanandamine → töötlemata töötlemine → vibratsioonivanandamine → kuumahju lõõmutamine → vibratsioonivanandamine → viimistlus, kõrvaldab täielikult osade negatiivse pinge ja hoiab osade jõudlust stabiilsena. Fikseeritud voodi, vasak ja parem sammas, pukk ja töölaud liiguvad; Sellel on freesimise, puurimise, puurimise, süvendamise, keermestamise jne funktsioonid. Tööriista jahutusmeetodiks on väline jahutamine. Tööpink sisaldab 5 etteandetelge, mis võivad realiseerida 4-teljelise ühenduse ja 5-teljelise ühetoimelise. Toitepead on 2. Tööpingi telg ja jõupea on näidatud alloleval joonisel.
2.1.Aksiaalse jõuülekande toiteosa põhistruktuur
2.1.1.X-telg:Töölaud liigub edasi-tagasi mööda fikseeritud voodi juhtsiini.
X 1-teljeline ajam: vahelduvvoolu servomootor ja ülitäpne planetaarreduktor käitatakse kuulkruvi abil, et juhtida töölaua liikumist X-telje lineaarse liikumise saavutamiseks
Juhtsiinide vorm: paigaldage kaks ülitugevat täpset lineaarset juhtsiini.
2.1.2 Z1 telg:Jõupea ja sadul on vertikaalselt paigaldatud samba esiküljele ning liiguvad edasi-tagasi mööda kolonni juhtrööpa üles-alla.
Z1-teljeline jõuülekanne: vahelduvvoolu servomootorit ja sünkroonratast kasutatakse kuulkruvi keeramiseks, et juhtida sadulat, et realiseerida Z-telje lineaarne liikumine
2.1.3 Z2 telg:Jõupea ja sadul on vertikaalselt paigaldatud samba esiküljele ning liiguvad edasi-tagasi mööda kolonni juhtrööpa üles-alla.
Z2-teljeline jõuülekanne: vahelduvvoolu servomootorit ja sünkroonratast kasutatakse kuulkruvi keeramiseks, et sõita sadulaga, et realiseerida Z-telje lineaarne liikumine.
2.1.4 Y1 telg:Jõupea sadul on paigaldatud vertikaalselt parema samba esiküljele ja liigub edasi-tagasi vasakule ja paremale piki samba juhtrööpa.
Y1-telje jõuülekanne: vahelduvvoolu servomootorit ja ülitäpset planetaarset reduktorit kasutatakse silindri juhtimiseks, et liikuda läbi kuulkruvi, et realiseerida Y1-telje lineaarne liikumine
2.1.5 Y2 telg:Jõupea sadul on vertikaalselt paigaldatud parema samba esiküljele ja liigub edasi-tagasi vasakule ja paremale piki samba juhtrööpa.
Y2-teljeline jõuülekanne: vahelduvvoolu servomootorit ja ülitäpset planetaarset reduktorit kasutatakse rammi juhtimiseks, et liikuda läbi kuulkruvi, et realiseerida Y2-telje lineaarne liikumine.
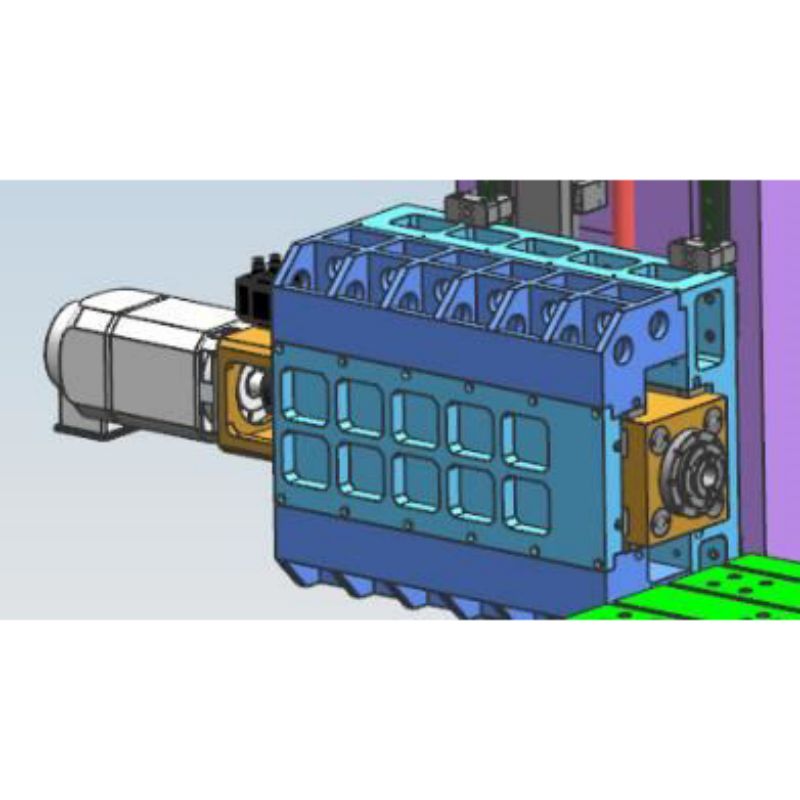
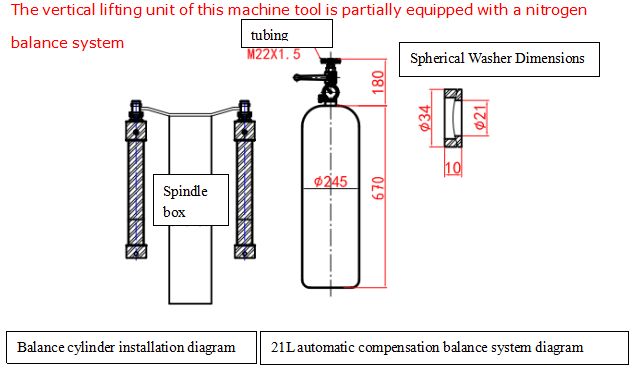
2.2.Puurimis- ja freesimispea (sealhulgas jõupead 1 ja 2) liikumissuunal on ruudukujuline rammustruktuur, mis on kõige arenenum traat-kõva kombineeritud juhtrööpa meetod, kõva siini ümbritseb tugev tugi, 4 lineaarse rulliga juhtsiin paarid juhitakse ja ajam kasutab vahelduvvoolu servomootorit. Käivitab sünkroonrihma (i=2) ja täpse kuulkruvi jõuülekande, jõupea kasutab servomootorit, et aeglustada läbi sünkroonrihma ja sünkroonratta, juhindudes raskeveokite täpsusest juhtrööpa paar ja ajab vertikaalset kuulkruvi pöörlema, realiseerides toitepea vertikaalse liikumise üles ja alla ning varustatud lämmastiku tasakaalupulgaga, et vähendada masina pea kandevõimet kruvil ja servomootoril. Z-telje mootoril on automaatne pidurdusfunktsioon. Elektrikatkestuse korral hoiab automaatpidur mootori võlli tugevalt kinni. , et see ei saaks pöörata. Töötamise ajal, kui puur ei puuduta töödeldavat detaili, söödetakse see kiiresti; kui puur puudutab töödeldavat detaili, lülitub see automaatselt tööetteandele. Kui puur läbib töödeldavat detaili, lülitub see automaatselt kiirele tagasikerimisele; kui puuri ots lahkub töödeldavast detailist ja jõuab seatud asendisse, liigub töölaud järgmisesse auguasendisse, et realiseerida automaatne tsirkulatsioon. Toitepea kasutab traadi ja kõva rööpa kombinatsiooni, mis mitte ainult ei taga seadmete liikumiskiirust, vaid suurendab oluliselt ka seadmete jäikust. Ja see suudab realiseerida pimedate aukude puurimise, freesimise, faasimise, laastude purustamise, automaatse laastu eemaldamise jne funktsioone, mis parandab tööviljakust.
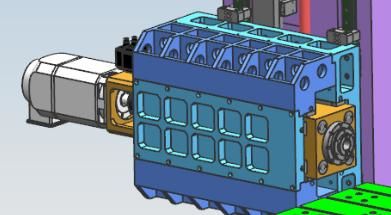
(vasak toitepea)
2.3. Laastude eemaldamine ja jahutamine
Töölaua alla on mõlemale küljele paigaldatud spiraalsed ja lamedad kettlaastude konveierid ning tsiviliseeritud tootmise teostamiseks saab laastud lõpus automaatselt laastkonveierile väljutada läbi kahe spiraal- ja kettplaatide etapi. Laastukonveieri jahutusvedeliku paagis on jahutuspump, mida saab kasutada tööriista väliseks jahutamiseks, et tagada puurimisvõime ja puuri tööiga, ning jahutusvedelikku saab taaskasutada.
3.Täielik digitaalne arvjuhtimissüsteem:
3.1.Laastu purustamise funktsiooniga saab inimese ja masina liidesel seadistada laastu purunemise aega ja laastu purunemise tsüklit.
3.2.Tööriista tõstmise funktsiooniga saab tööriista tõstekõrgust seadistada inimese ja masina liidesel. Kui puurimine saavutab selle kõrguse, tõstetakse puur kiiresti tooriku ülaossa, seejärel visatakse laastud minema ning seejärel suunatakse kiiresti edasi puurimispinnale ja muundatakse automaatselt tööks.
3.3.Tsentraliseeritud juhtimispult ja käeshoitav seade kasutavad arvjuhtimissüsteemi ning on varustatud USB-liidese ja vedelkristallekraaniga LCD-ekraaniga. Programmeerimise, salvestamise, kuvamise ja suhtluse hõlbustamiseks on tööliidesel sellised funktsioonid nagu inimese ja masina dialoog, veakompensatsioon ja automaatne häire.
3.4.Seadmel on enne töötlemist augu asukoha eelvaate ja uuesti kontrollimise funktsioon ning toiming on väga mugav.
4. Automaatne määrimine
Tööpinkide täpsed lineaarsed juhtrööpa paarid, täppiskuulkruvi paarid ja muud ülitäpsed liikumispaarid on varustatud automaatsete määrimissüsteemidega. Automaatne määrdepump väljastab surveõli ja kvantitatiivne määrdeõlikamber siseneb õli. Pärast õlikambri täitmist õliga, kui süsteemi rõhk tõuseb 1,4–1,75 Mpa-ni, suletakse süsteemi rõhulüliti, pump seiskub ja tühjendusklapp tühjeneb samal ajal. Kui õlirõhk teel langeb alla 0,2 Mpa, hakkab kvantitatiivne määrdeseade täitma määrimispunkti ja lõpetab ühe õlitäitmise. Tänu kvantitatiivse õlipihusti täpsele õlivarustusele ja süsteemi rõhu tuvastamisele on õlivarustus usaldusväärne, tagades iga kinemaatilise paari pinnale õlikile, vähendades hõõrdumist ja kulumist ning vältides seadme kahjustamist. ülekuumenemisest põhjustatud sisemine struktuur. , et tagada tööpingi täpsus ja tööiga. Võrreldes libiseva juhtrööpa paariga on selles tööpingis kasutataval veereval lineaarsel juhtsiinipaaril mitmeid eeliseid:
①Liikumistundlikkus on kõrge, veereva juhtrööpa hõõrdetegur on väike, ainult 0,0025–0,01, ja veojõud on oluliselt vähenenud, mis on võrdne 1/10-ga tavalistest masinatest.
② Dünaamilise ja staatilise hõõrdumise erinevus on väga väike ning järeltulemus on suurepärane, see tähendab, et ajavahemik sõidusignaali ja mehaanilise tegevuse vahel on äärmiselt lühike, mis aitab parandada reageerimiskiirust ja tundlikkust. arvjuhtimissüsteem.
③ See sobib suure kiirusega lineaarseks liikumiseks ja selle hetkekiirus on umbes 10 korda suurem kui libisevatel juhtsiinidel.
④ See võib realiseerida lünkadeta liikumise ja parandada mehaanilise süsteemi liikumise jäikust.
⑤ Professionaalsete tootjate toodetud see on suure täpsusega, hea mitmekülgsusega ja hõlpsasti hooldatav.
5. Masina kasutuskeskkond:
Toide: kolmefaasiline AC380V ± 10% , 50Hz ± 1 Ümbritseva temperatuur: 0 ° ~ 45 °
Viis, peamised tehnilised parameetrid:
6. Tehnilised parameetrid
| Mudel | BOSM12010 | |
| Töödeldava tooriku maksimaalne suurus | Pikkus × laius × kõrgus (mm) | 12000×1000×1500 |
| Lõikuri maksimaalne läbimõõt | 200 mm | |
| Pukk maksimaalne sööt | Laius (mm) | 1300 |
| töölaua suurus | Pikkus X Laius (mm) | 12000*1000 |
|
Horisontaalne ram tüüpi puurimispea võimsus pea üks kaks
| Kogus (2) | 2 |
| Spindli koonus | BT50 | |
| Puuri läbimõõt (mm) | Φ2-Φ60 | |
| Keerme läbimõõt (mm) | M3-M30 | |
| Spindli kiirus (r/min) | 30-6000 | |
| Servo spindli mootori võimsus (kw) | 37 | |
| Spindli nina kaugus laua keskpunktist (mm) | 150-650 | |
| Ühe rammi vasak ja parem käik (mm) | 500 | |
| Vahemaa trumli keskpunkti ja laua tasapinna vahel (mm) | 200-1700 | |
| Rammi käik üles ja alla (mm) | 1500 | |
| Korratavus | 300mm * 300mm | ±0,02 |
| Tööpingi mõõtmed | Pikkus × laius × kõrgus (mm) | jooniste järgi |
| Brutokaal (t) | (umbes) 62 | |
Ülaltoodud parameetrid on esialgsed projekteerimisparameetrid. Tegelikus konstruktsioonis võib olla muudatusi vastavalt töödeldava detaili töötlemisnõuetele ja tööpingi konstruktsiooninõuetele, et vastata teie ettevõtte töötlemisosade nõuetele.