






Hiina pneumaatilise roostevabast terasest sanitaar-toidu taseme liblikklapi odav hinnakiri

Meie äritegevuse filosoofia on luua potentsiaalsetele klientidele palju rohkem väärtust; ostjate kasv on meie töö jahiks Hiina pneumaatilise roostevabast terasest sanitaartehniliste toiduainete taseme liblikventiili odavate hinnakirjade järele. Ootame teid meie käest küsitlema kontakti või posti teel ning loodame luua tõhusa ja koostööaldis romantilise suhte.
Meie äritegevuse filosoofia on luua potentsiaalsetele klientidele palju rohkem väärtust; ostjate kasvatamine on meie tööTootja Valve, Klapi töötlemine, Püüame täita oma klientide nõudmisi kogu maailmas. Meie lahenduste ja teenuste valik täieneb pidevalt, et vastata klientide nõudmistele. Ootame uusi ja vanu kliente kõigilt elualadelt, et võtta meiega ühendust tulevaste ärisuhete ja vastastikuse edu saavutamiseks!
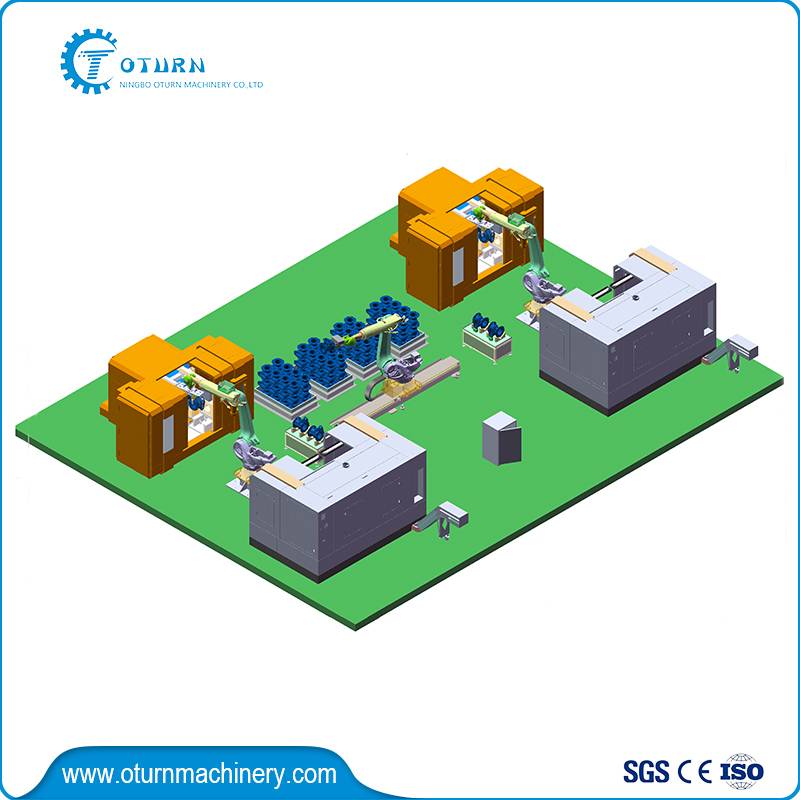
1. Operaator asetab klapi korpuse detaile täis kaubaaluse positsioneerimiseks laadimispositsioneerimispilusse 1 ja laadimispositsioneerimispilusse 2 ning asetab positsioneerimiseks tühja aluse laadimispositsioneerimispilusse 1 ja mahalaadimise positsioneerimispilusse 2.
2. Roboti 1 kaamera skannib kaubaalusel olevat töödeldavat detaili söötmispositsioneerimispilus 1, et töödeldav detail täpselt positsioneerida, ning toorik 1 kinnitatakse klambriga ja asetatakse puhverlaual 1 asuvasse positsioneerimisseadmesse.
Samal ajal haarab see töödeldud tooriku 3 (robot 2 haaras selle just tööpingilt 2), liigub mahalaadimispositsioneerimispilusse 1 ja asetab selle vastavalt vajadusele korralikult alusele.
Robotil 1 olev kaamera skannib kaubaalusel olevat töödeldavat detaili etteandepositsioneerimispilus 2, et toorik täpselt positsioneerida, ning toorik 4 kinnitatakse klambriga ja asetatakse puhverlaual 2 asuvasse positsioneerimisseadmesse.
Samal ajal haarab see töödeldud tooriku 6 (robot 3 haaras selle just tööpingilt 4), liigub mahalaadimispositsioneerimispilusse 2 ja asetab selle vastavalt vajadusele korralikult alusele.
3. Robot 2 kinnitab töödeldava detaili 1 puhverlaualt 1 ja jookseb tööpingi 1 juurde, haarab valmis tooriku 2 ja kinnitab töödeldava detaili 1, jookseb tööpingi 2 juurde, haarab valmis tooriku 3 ja kinnitab töödeldava detaili 2 kinni. , ja jookseb puhverlauale 1. Asetage toorik 3. Robot 2 lõpetab tsükli.
4. Robot 3 haarab töödeldava detaili 4 puhverlaualt 2 ja jookseb tööpingi 3 juurde, haarab valmis tooriku 5 ja kinnitab töödeldava detaili 4, jookseb tööpingi 4 juurde, haarab valmis tooriku 6 ja kinnitab töödeldava detaili 5 kinni. , ja jookseb puhverlauale 2. Asetage toorik 6. Robot 3 lõpetab tsükli.



 Meie äritegevuse filosoofia on luua potentsiaalsetele klientidele palju rohkem väärtust; ostjate kasv on meie töö jahiks Hiina pneumaatilise roostevabast terasest sanitaartehniliste toiduainete taseme liblikventiili odavate hinnakirjade järele. Ootame teid meie käest küsitlema kontakti või posti teel ning loodame luua tõhusa ja koostööaldis romantilise suhte.
Meie äritegevuse filosoofia on luua potentsiaalsetele klientidele palju rohkem väärtust; ostjate kasv on meie töö jahiks Hiina pneumaatilise roostevabast terasest sanitaartehniliste toiduainete taseme liblikventiili odavate hinnakirjade järele. Ootame teid meie käest küsitlema kontakti või posti teel ning loodame luua tõhusa ja koostööaldis romantilise suhte.
Hiina sanitaar-libliklapi, hügieenilise ventiili odav hinnakiri, püüame täita oma klientide nõudmisi kogu maailmas. Meie lahenduste ja teenuste valik täieneb pidevalt, et vastata klientide nõudmistele. Ootame uusi ja vanu kliente kõigilt elualadelt, et võtta meiega ühendust tulevaste ärisuhete ja vastastikuse edu saavutamiseks!
Saada meile oma sõnum:
Toodete kategooriad
-

18-aastane Hiina tehase Ck58 CNC kaldus voodi treipink...
-

Soodushind Hiina vertikaalne CNC treipingi velg...
-

Hiina 280 mm spindli tootmisettevõtted...
-

OEM/ODM hulgimüük Hiina ühefaasiline 220VAC 0,4...
-

CE-sertifikaat Hiina vahu lõikamise CNC-ruuter / ...
-
Tavaline allahindlus Hiina kvaliteediga Vtc45 vertikaalne ...